
【儀表網 研發快訊】在近日落幕的2025世界人工智能大會暨人工智能全球治理高級別會議(簡稱“WAIC2025”)上,由國家地方共建人形機器人創新中心發布的人形機器人“青龍Pro”正式亮相。作為合作生態伙伴,中國科學院合肥物質院智能所宋博研究團隊,為青龍pro提供了基于相機和激光雷達感知的人形機器人三維空間占據柵格地圖導航技術,顯著提高其在室內外復雜環境中的三維感知能力,實現了高精度定點導航與動態避障功能。
青龍pro是國家地方共建人形機器人創新中心推出國內第一款全尺寸開源人形機器人的家族成員之一,采用雙足結構,身高1.85米,體重85公斤。為進一步提高人形機器人的三維場景感知能力和導航避障功能,宋博團隊提出了一種融合視覺語義與空間幾何信息的三維柵格地圖預測方法。該方法能夠從單張RGB圖像推斷場景的完整3D語義占據圖,即同時預測每個三維網格單元的幾何占據狀態和語義類別(如車輛、道路、建筑和行人等),并融合多種異源異構傳感器數據,充分考慮室內外場景特征,實現了在復雜動態環境中的厘米級定位與安全平滑軌跡規劃,提高了導航避障的魯棒性與效率,確保人形機器人的安全運行。
值得一提的是,宋博團隊此次成功地將Occupancy感知技術應用于人形機器人,突破傳統的二維導航難以滿足機器人在復雜室內外三維環境中靈活避障、群體協作的難題,在傳統模型算法的基礎上,團隊基于實際人形機器人采集并制作了專用訓練樣本集,完成Occupancy模型的訓練與優化。該模型在不低于10Hz的實時推理速率下,達到了超過80%的空間預測精度,兼顧高效率與低成本,為人形機器人理解真實的三維世界邁出了關鍵一步。
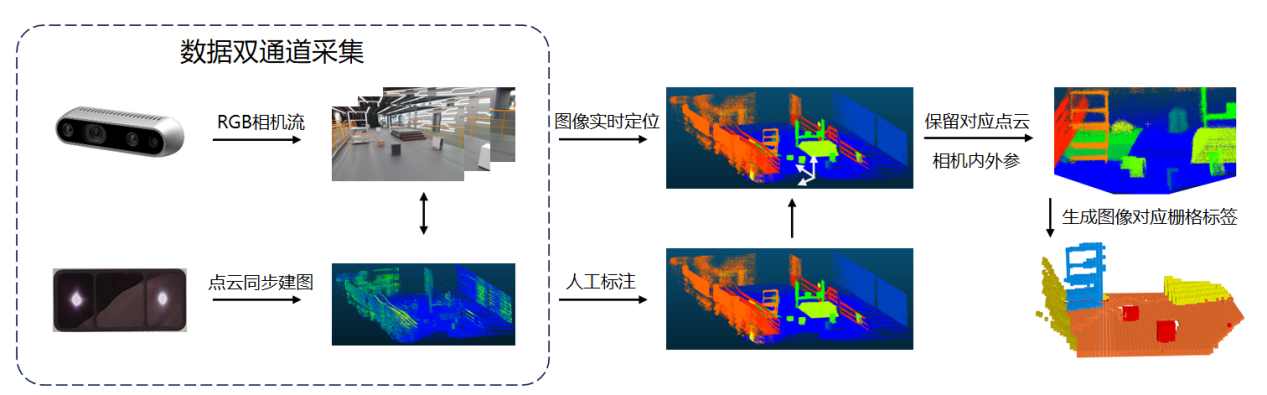
1. 三維柵格地圖預測樣本集制作流程圖
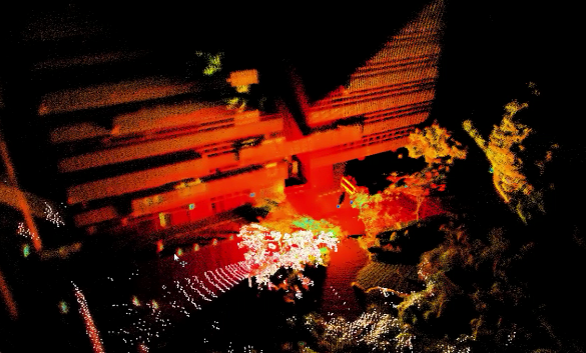
2. 室外劇烈運動情況下融合定位建圖




















所有評論僅代表網友意見,與本站立場無關。