
【儀表網 研發快訊】近日,中國科學院深圳先進技術研究院副研究員徐升和研究員徐天添團隊合作,提出了一套針對微型仿魚磁驅動機器人的復雜運動學習控制方法,通過寬度學習網絡訓練獲得了可控磁場變化與仿魚機器人多種動作基元之間的關系規律,實現了仿魚機器人的復雜運動,而且該方法無需復雜調參,并具有優異魯棒穩定性,保障了運動過程不受外界擾動影響。相關研究成果以A Robot Motion Learning Method Using Broad Learning System Verified by Small-scale Fish-like Robot為題發表在《IEEE控制論匯刊》(IEEE Transactions on Cybernetics)上。
微型仿魚機器人由于構型合理、尺度很小,可以更為靈活地在復雜狹小空間內穿梭作業,在微孔探查、靶向治療等小尺度操作領域具有巨大的應用潛力。但是,受磁場與機器人運動之間的強非線性影響,機器人按要求軌跡運動控制十分具有挑戰性。此外,在復雜場景中(如人體內),理想目標軌跡的準確坐標往往不便獲取,限制了追蹤控制策略的應用。體內環境迂曲復雜,存在頻繁方向改變,控制器反復調整計算復雜繁瑣,存在重復性。因此,有必要將微型機器人的底層運動封裝為基本運動,例如直走、直角彎、S形彎、C形彎等,并將這些基本運動作為高層運動指令庫的基元,便于在后續的宏觀運動路徑規劃中按需調用,可降低實時控制指令的解算復雜度。研究團隊結合寬度學習理論,對磁控仿魚機器人的運動基元開展訓練學習,完成了多種復雜運動。
研究團隊設計了以寬度神經網絡為主體的微型機器人基本運動控制器;基于李雅普諾夫穩定理論,推導了保障機器人運動穩定的控制器網絡參數約束,簡化了不同運動基元的控制器參數訓練學習過程;提出了以磁場參數變化與機器人速度矢量變化為所需數據的控制器網絡參數訓練方法,使用者只需通過改變訓練數據的種類即可獲得多種運動基元,而且考慮了穩定約束的訓練算法可以保證所獲得的控制器的穩定性。
通過仿真及實驗,研究團隊運用提出的學習控制方法獲得了銳角彎、J形彎、S形彎等多種運動基元的微型機器人控制器,并開展了仿魚機器人避障運動實驗。在機器人運動過程中,研究人員通過人為搖晃容器、暴力碰觸機器人模擬了真實場景中可能存在的復雜擾動,機器人在復雜環境中,直接調用C形彎、S形彎等運動基元實現高效避障,通過使用所提方法機器人均可以抵達最終指定區域,驗證了所提方法的強抗擾能力。該成果符合高層運動指令規劃的思想,大幅簡化了實時控制指令解算復雜度,為微型機器人的多機集群運動或無參考軌跡最優運動規劃打下了基礎,同時還可推廣至無人機、無人車以及工業機器人的復雜運動控制。
相關研究工作得到國家重點研發計劃、國家自然科學基金、廣東省自然科學基金、中國科學院青年創新促進會、深圳市等科技項目的資助。

圖1 基于寬度神經網絡的微型仿魚機器人運動基元學習控制方法
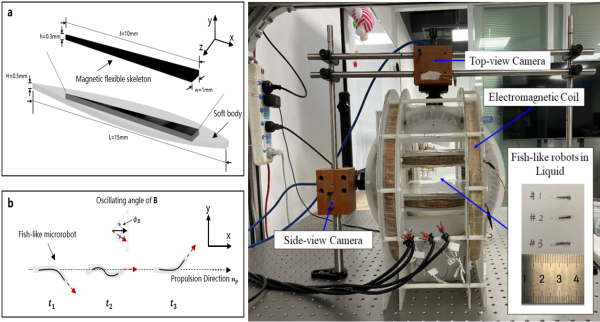
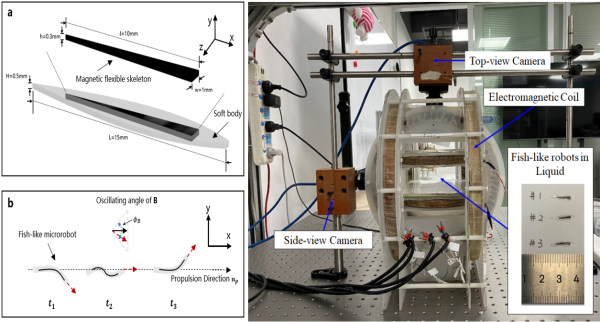
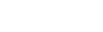
圖2 微型仿魚機器人結構及運動原理,磁驅動實驗系統


圖3 機器人多次執行“S”形避障實際效果

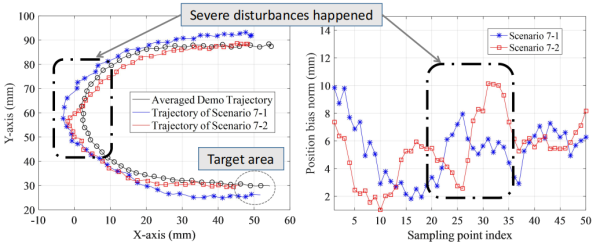

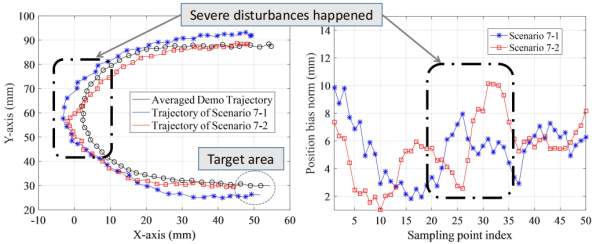
圖4 機器人強抗擾能力驗證(暴力阻攔、容器振動)




















所有評論僅代表網友意見,與本站立場無關。